



 En estructuras metálicas es común utilizar uniones atornilladas con taladros rasgados (agujeros colisos) para permitir la libre dilatación de los elementos ante las cargas térmicas. Resulta interesante analizar cómo se puede modelizar este comportamiento en el conjunto de una estructura en función de la libre dilatación (e).
En estructuras metálicas es común utilizar uniones atornilladas con taladros rasgados (agujeros colisos) para permitir la libre dilatación de los elementos ante las cargas térmicas. Resulta interesante analizar cómo se puede modelizar este comportamiento en el conjunto de una estructura en función de la libre dilatación (e).
Imagen 1 – Taladro rasgado de diámetro d0 y longitud libre e.
El proceso natural de diseño debería ser el siguiente:
- Calcular el máximo desplazamiento por dilatación de la estructura que afectaría a la unión en cuestión.
- En función del cálculo anterior, determinar la longitud e suficiente para permitir la libre dilatación.
Si esto fuese así, ya se sabe que el elemento en cuestión puede dilatar libremente y la modelización de este comportamiento pasa sólo por liberar la restricción al desplazamiento longitudinal (aplicar un release). Conceptualmente, la modelización de una viga biapoyada sometida a temperatura uniforme quedaría como sigue:

Imagen 2 – Modelización conceptual de viga biapoyada que tiene permitida la libre dilatación en uno de sus extremos.
No obstante, es común que las características de las uniones atornilladas vengan impuestas por estándares, lo que puede provocar que la dimensión e sea insuficiente. Es decir, puede ocurrir que la barra trate de dilatar más de lo que el rasgado de la unión le permite. En este caso el comportamiento del apoyo de libre dilatación tiene dos modos:
- Libre dilatación mientras el desplazamiento longitudinal (u1) sea menor que e.
- Restricción de desplazamiento longitudinal (y consecuente aparición de esfuerzos de compresión) cuando u1=e.
El esquema conceptual sería el que sigue:
Imagen 3 – Modelización conceptual de viga biapoyada con desplazamiento longitudinal parcialmente permitido en uno de sus apoyos.
Pongamos un ejemplo:
Una barra biapoyada se ve sometida a un incremento de temperatura respecto a la temperatura de instalación de 72 0C (300 por temperatura ambiente y 420 por radiación solar). La barra tiene un perfil IPE220, es de acero S275 y la longitud total es de 20 m. En uno de sus extremos, el apoyo le permite un desplazamiento de 1 cm.
La dilatación longitudinal en una barra en caso de no tener restricciones se calcula como:
ΔL=αL·ΔT·L
Siendo:
ΔL: Alargamiento por temperatura uniforme.
αL: Coeficiente de dilatación lineal del material.
ΔT: Incremento de temperatura.
L: Longitud inicial de la barra.
Así, se obtiene el siguiente resultado:
|
L (m) |
20 |
|
aL (0C-1) |
1.20E-05 |
|
DT (0C) |
72 |
|
DL (cm) |
1.73 |
Tabla 1 – Deformación libre por dilatación.
Dado que la deformación que permite el apoyo es de 1 cm, la barra sufrirá dos procesos:
- Dilatará libremente hasta haberse alargado 1 cm sin que se produzcan esfuerzos.
- Dejará de dilatar y sufrirá el esfuerzo axil de compresión correspondiente al intento de dilatar los 0.73 cm que no permite el apoyo.
El esfuerzo que se produce es el equivalente al que sufre la barra al acortarla 0.73 cm.
Resulta sencillo obtener este esfuerzo axil por teoría clásica de resistencia de materiales:
|
L (m) |
20 |
Perfil |
IPE220 |
|
|
aL (0C-1) |
1.20E-05 |
A (cm2) |
33.4 |
|
|
DL (cm) |
-0.73 |
E (MPa) |
210,000 |
|
|
|
|
e |
3.64E-04 |
|
|
|
|
N (kN) |
-255.31 |
|
|
s (MPa) |
-76.44 |
|||
|
fy (MPa) |
275 |
|||
|
s / fy |
27.80% |
Tabla 2 – Cálculo del esfuerzo axil producido cuando la barra ha dilatado todo lo que el apoyo permite.
Las tensiones provocadas por la restricción aplicada corresponden prácticamente a un 30% del límite elástico, por lo que no son en absoluto despreciables.
Lo que se demuestra con este sencillo ejemplo es que se incurriría en importantes errores de cálculo si se modelizase esta estructura bien con desplazamiento longitudinal libre en uno de sus extremos, o bien con dicho desplazamiento restringido en ambos apoyos.
Se trata de un comportamiento no lineal (al tener dos fases diferenciadas el comportamiento pierde su linealidad) sencillo de comprender y calcular en casos tan simples como el aquí expuesto, pero que en muchas situaciones supone un problema para su modelización en programas de cálculo de estructuras.
Entonces, ¿cómo lo modelizamos en un programa de cálculo?
La forma de resolver este tipo de problemas suele ser la de utilizar un elemento tipo gap y llevar a cabo un análisis no lineal. El esquema conceptual de este elemento es el siguiente:
Imagen 4 – Esquema conceptual de un elemento tipo gap.
La relación fuerza (f) – deformación (def) de este elemento en una dirección viene dada por:
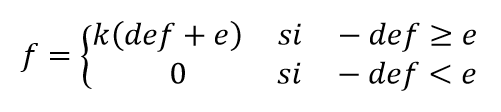
Siendo def negativa si se trata de un acortamiento.
Este elemento tiene cantidad de aplicaciones y resulta de gran utilidad en un buen número de casos prácticos. Para el caso que aquí nos ocupa, el parámetro e corresponde a la longitud de libre deformación que exista en la unión, mientras que la rigidez se puede tomar como infinita (algunos órdenes de magnitud por encima de la rigidez de la estructura). Es decir, con esta configuración permitiríamos el acercamiento de los nodos i y j hasta cerrar el hueco. A partir de ese momento ya no se permite mayor acortamiento.
En el software SAP2000, el elemento gap se engloba dentro de los elementos tipo link. Así, al definir las características de un link podemos configurarlo para que actúe como se ha explicado.
A continuación, se incluye un esquema del proceso para crear un link tipo gap que sirva para modelizar el ejemplo estudiado anteriormente.
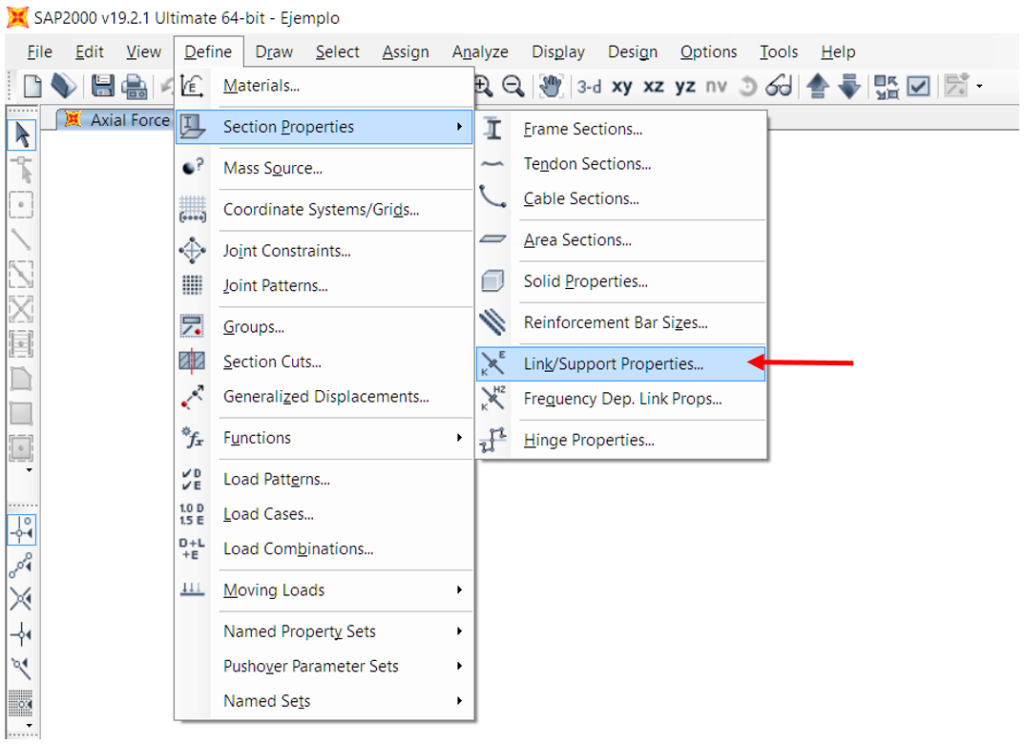
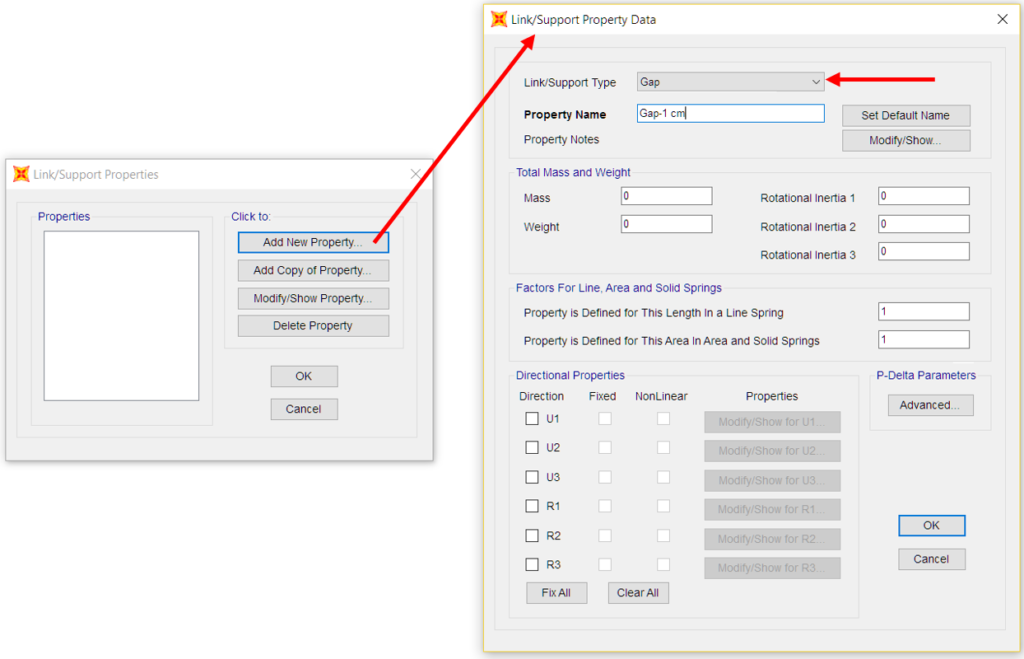
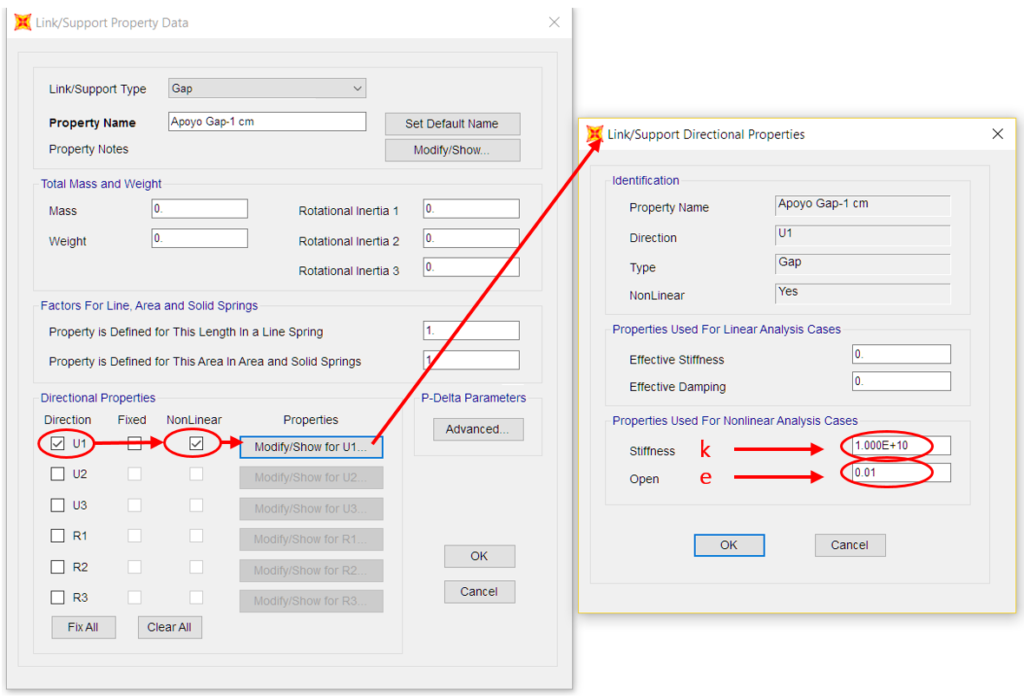 Imagen 5 – Proceso para configurar un elemento tipo gap en SAP2000.
Imagen 5 – Proceso para configurar un elemento tipo gap en SAP2000.
Para definir una rigidez que no permita desplazamiento más allá de la longitud e, no se recomienda utilizar un valor exageradamente alto, sino un valor entre 1 y 3 órdenes de magnitud mayor que la rigidez de los elementos colindantes. Valores demasiado altos pueden dar lugar a la generación de matrices singulares.
Una vez definido el elemento, la geometría y los vínculos exteriores del problema anterior se pueden configurar como sigue:
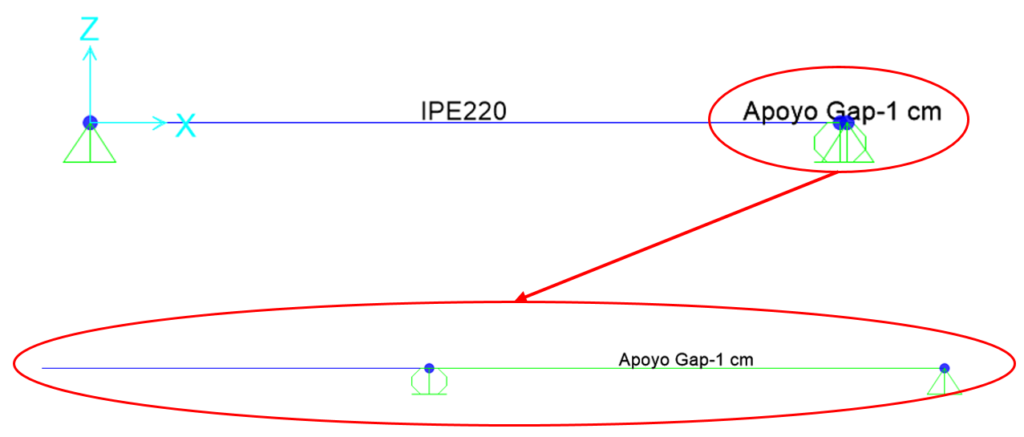 Imagen 6 – Configuración de apoyo con elemento gap en dirección longitudinal.
Imagen 6 – Configuración de apoyo con elemento gap en dirección longitudinal.
Esta configuración es sólo una de las posibles. Como se observa, se ha liberado el desplazamiento longitudinal en el apoyo real, y se ha creado otro apoyo ficticio fuera de la estructura. Entre estos dos apoyos se coloca el elemento gap (2-joint link), que sólo permitirá el desplazamiento de 1 cm en dirección X en el apoyo real.
Una vez creada la configuración geométrica, se aplican los 720 de temperatura sobre la barra y se configura el caso de carga afectado como NO LINEAL. En aquellos casos de carga que no sean definidos como NO LINEAL, este link no tendrá repercusión ninguna.
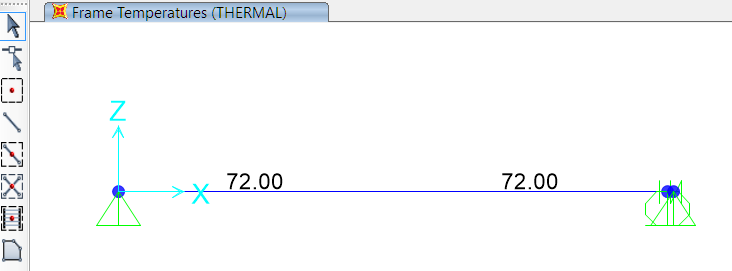 Imagen 7 – Temperatura aplicada a la barra.
Imagen 7 – Temperatura aplicada a la barra.
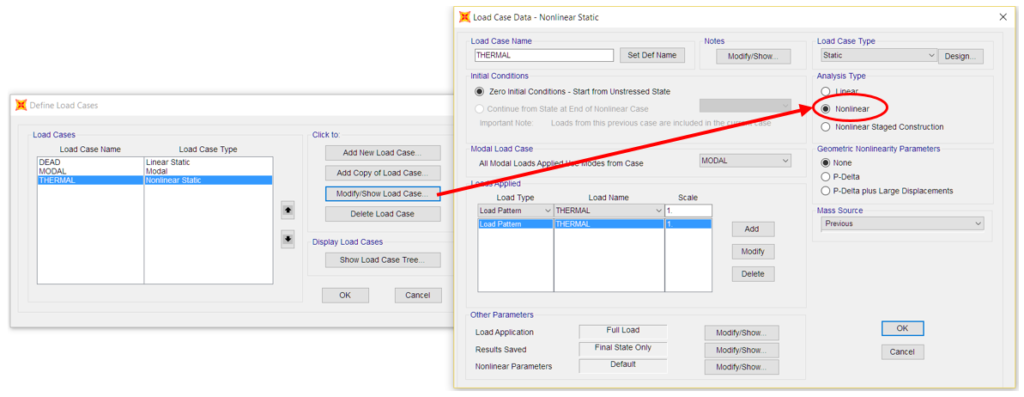 Imagen 8 – Configuración de casos de carga como NO LINEAL.
Imagen 8 – Configuración de casos de carga como NO LINEAL.
Implementada esta configuración y llevados a cabo los cálculos, los resultados obtenidos en esfuerzos y deformaciones son los mismos que se habían calculado previamente:
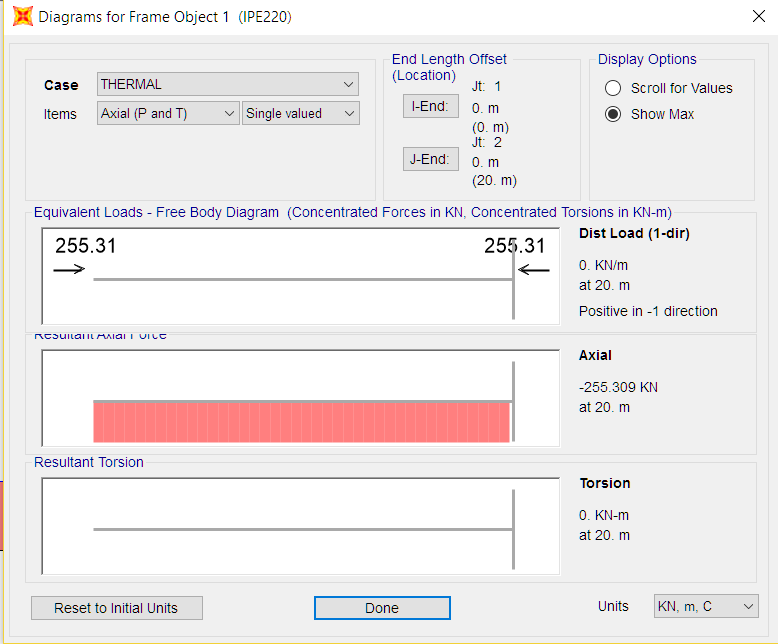
Imagen 9 – Diagrama de esfuerzos en la barra (axil de -255.31 kN).
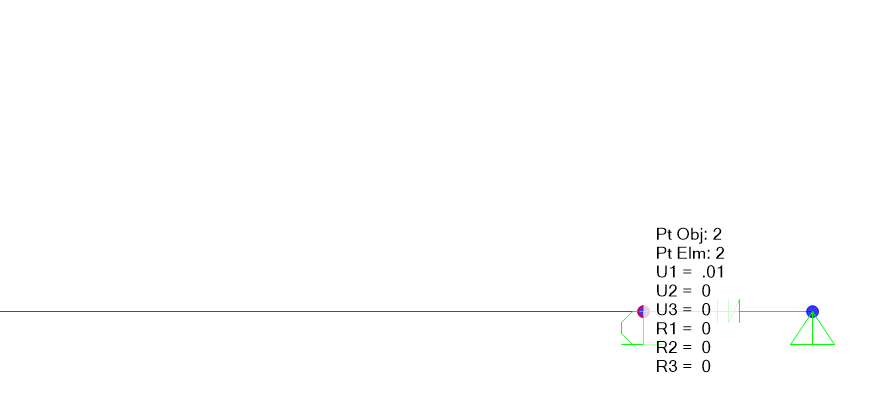 Imagen 10 – Desplazamientos en apoyo extremo (1 cm).
Imagen 10 – Desplazamientos en apoyo extremo (1 cm).
Este es quizás el caso más sencillo de aplicación del elemento gap, no obstante, es suficientemente ilustrativo para mostrar las posibilidades del elemento. Al definir el link se pueden implementar el comportamiento de un gap independiente en cada grado de libertad, o fijar todos los movimientos en el g.d.l. que nos interese, etc. Así, puede resultar de gran utilidad siempre que haya un hueco que creamos importante de tratar en nuestra estructura.
Por ejemplo, en la siguiente figura se ha utilizado para modelizar el hueco entre dos partes de una plataforma que apoyan sobre un mismo pilar. En este caso concreto, si no se incluye el link tipo gap cada plataforma se mueve longitudinalmente sin tener en cuenta el “choque” con la colindante. En la configuración de este elemento se fijaron los desplazamientos verticales y transversales a las plataformas, de acuerdo con las características de los apoyos reales.
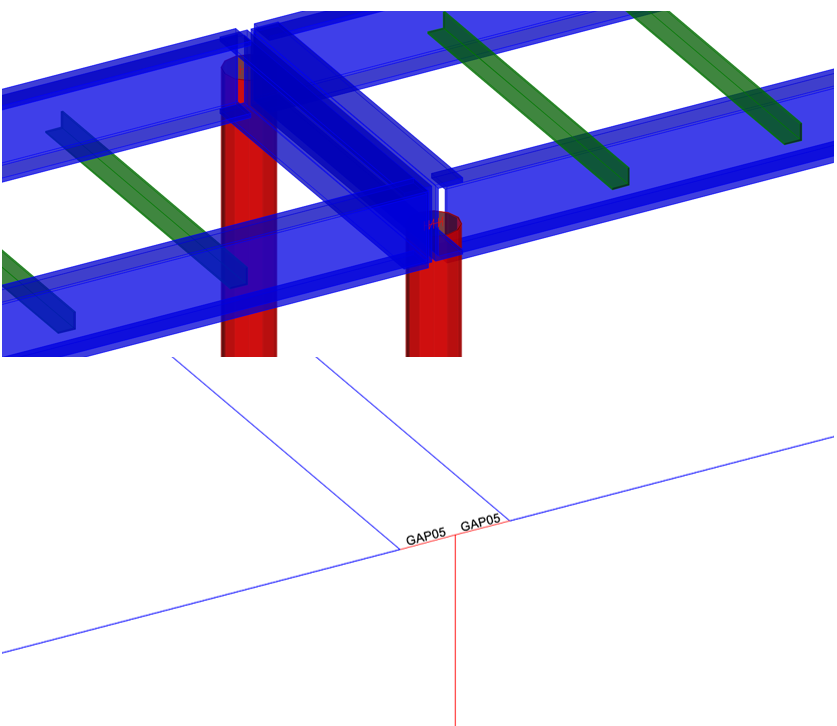
Imagen 11 – Ejemplo de utilización de elementos tipo gap.
Más ejemplos interesantes se pueden encontrar en el siguiente link (en este caso para tener en cuenta edificios colindantes pero ligeramente separados que pueden influir en el cálculo dinámico).
También existe un elemento para modelizar lo contrario, huecos que se pueden abrir hasta una determinada longitud, son los elementos tipo hook.
¡Espero que este post pueda ser de utilidad y nos vemos pronto por aquí!




{kind=link}